bladex.blade.Blade.rotate¶
-
Blade.rotate(deg_angle=None, rad_angle=None)[source]¶ 3D counter clockwise rotation about the X-axis of the Cartesian coordinate system, which is the axis of rotation of the propeller hub.
The rotation matrix,
 , is used to perform rotation
in the 3D Euclidean space about the X-axis, which is – by default –
the propeller axis of rotation. is defined by:
, is used to perform rotation
in the 3D Euclidean space about the X-axis, which is – by default –
the propeller axis of rotation. is defined by: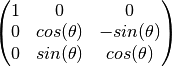
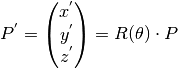
Given the coordinates of point
 such that
such that
Then, the rotated coordinates will be:
Parameters: Raises: ValueError – if both rad_angle and deg_angle are inserted, or if neither is inserted